





电子控制空气悬架具有根据行驶工况来主动调节悬架高度和被动保护悬架高度的功能,使得车辆能根据不同的路况条件选择不同的车身高度,适应比机械式高度阀控制的传统空气悬架更多的行驶工况,是对平顺性和操纵稳定性折衷的一种良好的解决方案。
空气弹簧通过充气来实现空气悬架高度调节的过程中与气囊外部存在空气质量交换,其内部气体的热力学过程相当复杂,属于变质量变体积气容的热力学过程。由于高度阀控制的空去悬架与电磁阀控制的空气悬架结构和功能上的不同,机械式高度阀由机械机构来控制阀门开度所产生的节流效果来控制通过气体的流量,且无法实现从某一设定高度提升到另一设定高度的主动调节。而电磁阀的开度是一定的,其控制气体流量是通过电磁阀开启的时间来实现,可以实现高度的主动调节。
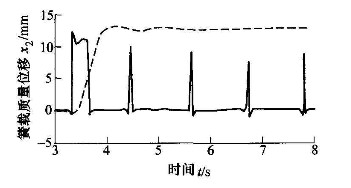
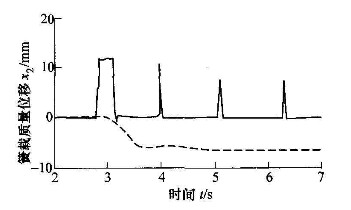
电子控制空气悬架高度调节过程设计到气体回路的流量特性、减震器的阻尼特性和空气弹簧的动态特性以及气囊内气体的热力学变化,是一个复杂的非线性动态过程。其实质是利用电磁阀两段的压力差在管路中产生气体流量,使得空气弹簧内的空气质量、压力、体积、温度、密度发生变化的热力学过程。典型的高度调节过程如上图所示,图中虚线为簧载质量位移信号,实线为电磁阀脉冲信号,充气或者排气过程在时间上分为两个阶段:电磁阀充气(排气)阀门持续开启阶段,电磁阀充气(排气)关闭后的阶段。从图中很容易看出由于减震器阻尼作用使得悬架质量垂直运动产生的滞后,即电磁阀关闭,停止充气后,车身高度仍然继续被抬升。车身高度变化受到阻尼作用而出现滞后导致最终高度超出设定的目标高度,出现所谓的“过充”现象。
仿真中的流量特性于实际气体回路的流量特性之间的差异,实际中簧载质量垂向运动中的阻力不仅有空气悬架减震器的阻尼力,还有其他运动部件的阻力,可以通过试验对模型的参数进行修正。(zc)